













с 01.01.1977 по 01.01.2023
Ростов-на-Дону, Ростовская область, Россия
Ростов-на-Дону, Ростовская область, Россия
Динамическое воздействие движущегося транспорта может вызвать эффекты, приводящие к оползневым процессам в склонах. Даже незначительные по амплитуде перемещения и скорости приводят к относительной подвижке слоев. При этом могут существенно измениться физико-механические параметры слагающих склон грунтов. Например, снижение сцепления С может быть аналогично снижение силы трения покоя переходом к трению скольжения. Это связано с тем, что взаимная подвижка приводит к проскальзыванию малых фрагментов грунта относительно друг друга. Влияние транспортных средств на возможные оползневые процессы возрастает при очевидной тенденции к увеличению скорости и массы подвижного состава. Это, а также сложное геологическое строение склонов и необходимость учета подкрепляющих конструкций приводит к необходимости построения уточненных механико-математических моделей совместной работы дорожных конструкций, склона и подкрепляющих сооружений в динамической постановке. Создание уточненной модели геометрии склона, автомобильной дороги и конструкций усиления склона сегодня решается в основном методом конечных элементов (МКЭ). Актуальна проблема построения численного решения подобных задач на основе прямых методов интегрирования уравнений движений. При этом необходимо учесть изменение распределения масс при перемещении транспорта по автомобильной дороге с различной скоростью. В ряде работ автора [9-15] для решения подобной использована явная абсолютно устойчивая схема интегрирования уравнений движения МКЭ. В данной статье рассмотрено тестирование метода сравнением численных решений с известными для более простых по топологической структуре задачами. А именно - выполнено сравнение метода с решениями классической задачи «движение массивного груза по массивной балке». В качестве «эталонного» принято решение В.В.Болотина [7-9]. Численные решения показали высокую степень сходимости результатов предлагаемым и «эталонным» методами.
метод конечных элементов, вариационное уравнение, уравнение движения, переменная масса, динамика, статика, устойчивость численных методов, явные схемы прямого интегрирования, неявные схемы прямого интегрирования, абсолютно устойчивые схемы
Введение
Рост скорости и массы подвижного состава неуклонно возрастает последние десятилетия. В связи с этим возрастает роль динамического расчета инженерных конструкций на действие подвижных нагрузок. К таким расчетам относятся задачи нахождения напряженно-деформированного состояния (НДС) системы и его максимальных параметров (максимальных напряжений, перемещений, скоростей и ускорений), задачи определения несущей способности и устойчивости конструкции под воздействием подвижных нагрузок.
Исследования, посвященные учету динамических эффектов от движения нагрузки, начались более 150 лет назад – после обрушения Честерского моста (Англия, май 1847 г). Работы, посвященные этой проблеме, выполнялись известными учеными: Брессом, Гогенемзером, Прагером, С. А. Бернштейном, А. Н. Крыловым, С. П. Тимошенко, Я. Г. Пановко и И. И. Губановой, А. П. Филипповым и многими другими.
По степени учета инертности конструкции и нагрузки эти исследования разделялись на четыре класса:
- без учета инерционных свойств конструкции и нагрузки,
- учет только инерционных свойств конструкции,
- безмассовая конструкция и массивная нагрузка,
- учитывается как масса конструкции, так и нагрузки.
Очевидно, что последняя постановка наиболее общая, т.к. первые три могут рассматриваться как частные случаи решения в постановке учета масс конструкции и груза.
Прямое интегрирование уравнений движения в форме метода конечных элементов
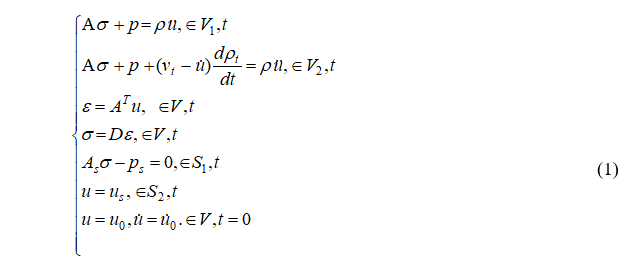
При движении транспорта по полотну автомобильной дороги на части объема V1 инерционные свойства системы остаются постоянными, но на поверхности полотна происходит постоянное перераспределение масс системы за счет перемещающихся со скоростью vt массивных объектов.
Согласно [11-13], на основе уравнения Мещерского, уравнения динамической теории упругости с переменной массой записаны в (1):
Вариационное уравнение типа Лагранжа в свертках для системы с переменной массой (2) получено на основе известного подхода Гэртина [11].

Для пространственной области уравнения движения в форме метода конечных элементов (3) строится традиционно.
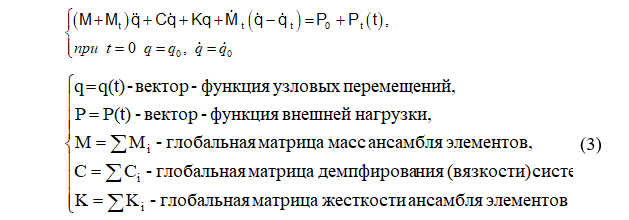
В работе используется явная абсолютно устойчивая схема прямого интегрирования уравнений движения с переменной массой (4), которая была впервые получена в работах Л.Н.Панасюка и В.П.Матуа [7, 10-11]:
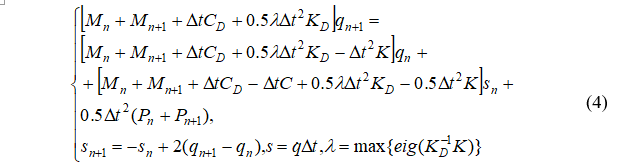
Приведенная явная схема является абсолютно устойчивой в смысле критерия Дж.Неймана [4]. Доказательство факта абсолютной устойчивости базируется на разложении (4) по собственным формам матрицы KD-1K. Доказана ортогональность собственных векторов разложения. В результате чего систему (4) можно представить в «расщепленной» форме (5) [5-6]:

Абсолютная устойчивость обеспечена при =0.5(m+3)λ. Здесь ƛ – максимальное собственное число матрицы (KD)-1K [43, 48-50].
«Эталонное» решение задачи
Для тестирования схемы (4) рассмотрено известное решение В.В. Болотина [1-3, 8]. Им обобщена предложенная Инглисом система дифференциальных уравнений движения по балке произвольной системы масс в любой комбинации нагрузок. Инерционные свойства подвижной нагрузки были построены в форме (6):

Во многих исследованиях задач динамики балок с подвижными массивными нагрузками результаты В. В. Болотина принимаются за эталон. Уравнение вида (6) называют уравнением Инглиса — Болотина. Аналитическое решение (6) не найдено. Известные решения получены численно. Наиболее часто применяемым является метод Бубнова-Галеркина. При удержании одного симметричного члена разложения (7) априори задается симметричная изогнутая ось балки в любой момент времени, что не соответствует истинной картине решения. Для уточнения решения В.В.Болотина в работе рассмотрена аппроксимация со вторым кососимметричным слагаемым (8).

Использование (7) и (8) порождает системы обыкновенных дифференциальных уравнений (9) и (10) относительно аргумента времени t:
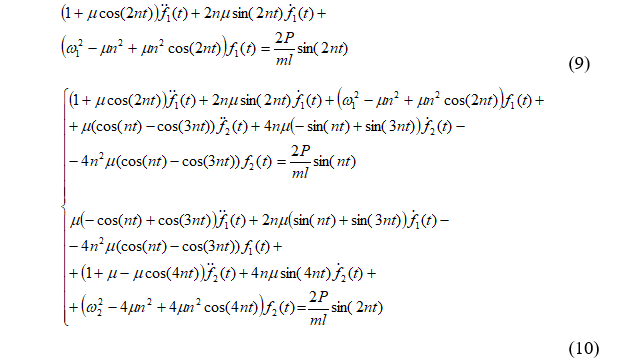
В (9)-(10) использованы обозначения:

Используя замену  , уравнения (9) и (10) сводятся к системе из двух и четырех уравнений первого порядка соответственно (здесь не приведены).
, уравнения (9) и (10) сводятся к системе из двух и четырех уравнений первого порядка соответственно (здесь не приведены).
Численное решение последних уравнений используется для получения «эталонных» численных решений методом Рунге-Кутта 6 порядка, реализация выполнена с использованием функций комплекса Scilab.
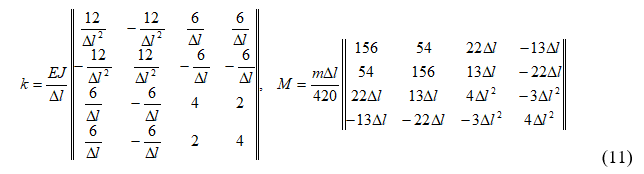
При реализации предлагаемого МКЭ подхода (4) ось балки разбивалась на плоские балочные конечные элементы с четырьмя степенями свободы (продольными деформациями пренебрегали). Ось балки разбита на 100 конечных элементов. Локальные матрицы балочных элементов (11) построены традиционно. Тестируемое решение строилось в комплексе Scilab.
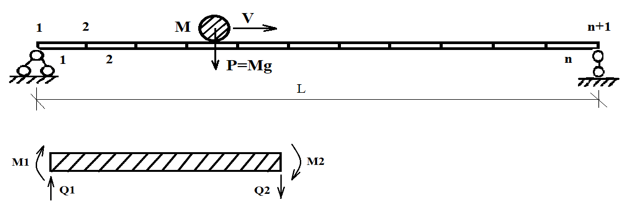
Рисунок 1. МКЭ модель балки и степени свободы балочного элемента
Выборка результаты тестовых расчетов
В расчетах варьировались отношение массы груза к массе балки в сегменте [0.05…0.5] и отношение скорости груза к «критической» в таком же сегменте.
На рис. 2-7 показана выборка некоторых результатов сравнительных расчетов. Графически результаты представлены в виде четырех графиков. Три графика отражают колебания точек балки на расстоянии 0.25, 0.50 и 0.75 от длины пролета. На четвертом графике показана деформированная ось балки в различные моменты времени. В первых трех графиках время сопоставлено с положением груза на балке приведенной единичной длины. Т.е., эти три графика можно рассматривать как динамические линии влияния перемещений различных точек балки единичной длины. Графики даны на сегменте [0…1.4] от длины пролета, что соответствует движению груза по балке и после схода с нее. На сегменте [1… 1.4] наблюдаем свободные колебания, возникающие после «схода» груза с конструкции.
Влияние удержания одного или двух членов аппроксимации решения методом Бубнова-Галеркина отчетливо прослеживается для сечений балки, расположенных на первой и последней четверти пролета. Для них более приближенное решение при удержании одного члена аппроксимации (зеленая ветвь) имеет большую погрешность, чем для практически совпадающих решений согласно (4) и (10). Однако для центрального сечения балки все три решения практически совпадают. Также совпадают все три решения в области свободных колебаний сечений после схода груза с балки.
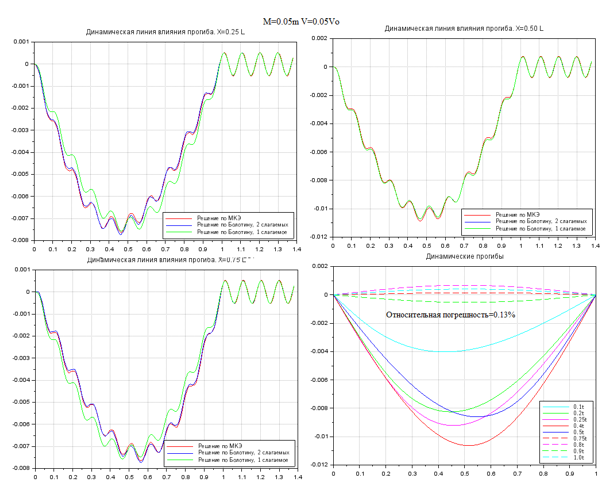
Рисунок 2. Колебания при M=0.05m, V=0.05V0
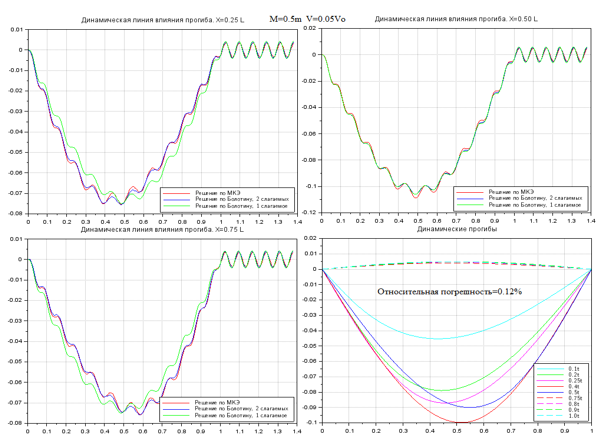
Рисунок 3. Колебания при M=0.5m, V=0.05V0
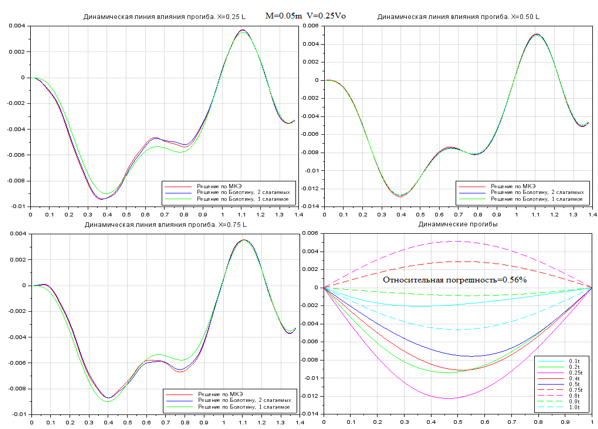
Рисунок 4. Колебания при M=0.05m, V=0.25V0
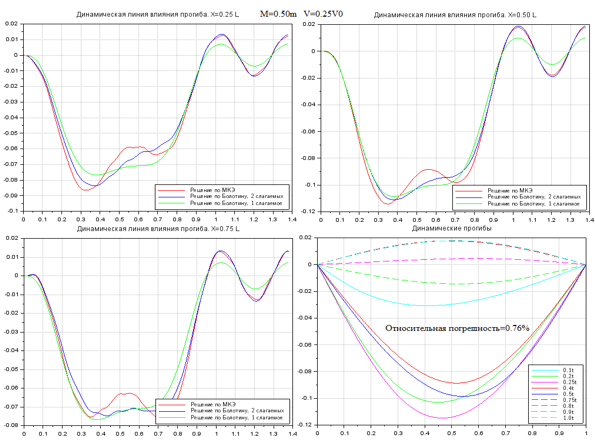
Рисунок 5. Колебания при M=0.50m, V=0.25V0
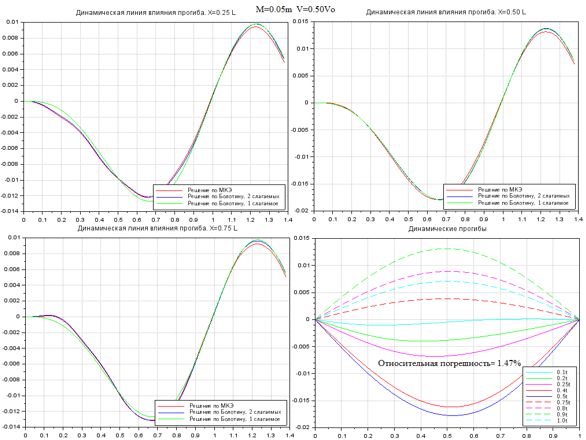
Рисунок 6. Колебания при M=0.05m, V=0.50V0
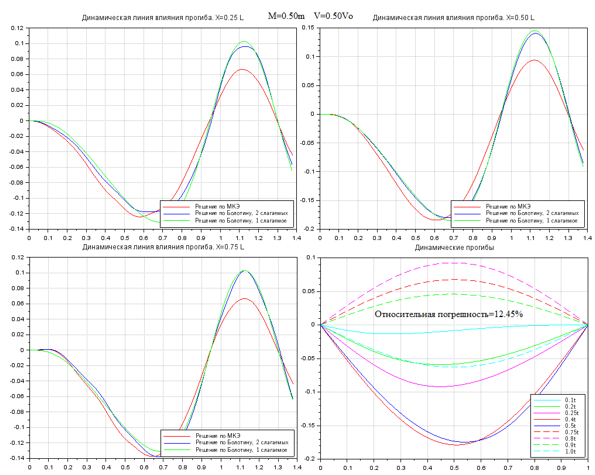
Рисунок 7. Колебания при M=0.50m, V=0.50V0
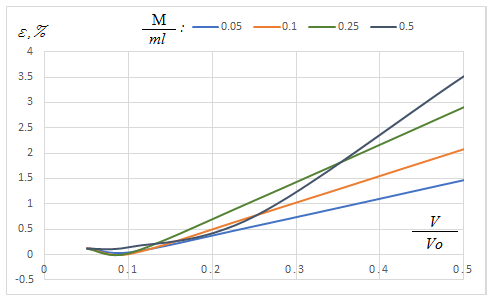
Рисунок 8. Среднеквадратичная погрешность, (%)
Выводы по тестовой задаче
Анализ результатов показывает высокую степень совпадения результатов, полученных по тестируемой схеме (4) с известными «эталонными» решениями (9)-(10).
Отметим, что решения (4) в большей части области совпадает с уточненным решением уравнений В.В. Болотина (10). Различия между результатами по (9) и по (10) указывают на необходимость учитывать кососимметричные слагаемые в аппроксимации по пространственной оси в методе Бубнова-Галеркина.
Относительная погрешность для большей части результатов между эталонным (10) и тестируемым (4) имеет порядок 0.1%.
Максимальная погрешность достигается при высоких скоростях движения, равных половине критической скорости, но не превышает 3-3.5%.
Анализ погрешности решения позволяет сделать вывод, что явную абсолютно устойчивую схему интегрирования уравнений движения в форме МКЭ (4) можно применять в реальных задачах со сложной геометрией и распределением физико-механических параметров расчетной пространственной области.
Модельный пример расчета движения автомобилей по двухполосной дороге, расположенной на склоне
По изложенной методике выполнено моделирование движения автомобилей по автомобильной дороге, расположенной на склоне. В расчете варьировались типы и скорости движения автомобилей, полоса движения (первая или вторая), расположение автодороги от края склона (0,25; 0,5; 0,75; 1,0 метров). Конечно-элементная модель неоднородного склона (по поперечному сечению) приведена на рис. 9. В данной реализации программного комплекса в графическом редакторе формировалась конечно-элементная модель поперечника склона. Системы разрешающих уравнений (4) для пространственной задачи автоматически формировались методом экструзии из плоской конечно-элементной модели поперечника [14-15]. Расчет выполнялся в пространственной постановке. Конечные элементы – треугольные призмы, с тремя линейными степенями свободы в узлах – автоматически формируются из плоских треугольных элементов.
Результаты приведены для некоторых типов автомобилей (двухосный грузовой автомобиль, четырехосный грузовой автомобиль, трехосный седельный автопоезд). Параметры автомобилей приняты согласно действующим нормам проектирования автомобильных дорог.
Основные данные расчета: ширина одной полосы автомобильной дороги 3.5м. Состав дорожной конструкции: верхний слой 50мм – мелкозернистый асфальтобетон ЩМА-15, второй слой 100мм – крупнозернистый пористый асфальтобетон, третий слой 300мм – гравийно-песчаная смесь С1. Параметры автомобилей показаны на рис. 3.1.
Размер сетки конечных элементов варьировался от 0,1м в окрестности автомобильной дороги и угловых точек до 0,5 – 0,6 м в удаленных зонах. Общее число узлов сетки конечных элементов 427 тысяч, что соответствует порядку матрицы жесткости 1281000. Матрица масс принята несогласованной, точечные массы консолидированы в узлах. Поэтому матрица масс диагональная. Для устранения эффекта отражения волн от границ области в окрестности границ введено два фиктивных слоя с повышенными коэффициентами демпфирования (0,5 и 0,7 от критического). Этот известный прием обеспечивает затухание прямой и отраженных волн в окрестности границ расчетной области.
Рассматривался фрагмент автодороги длиной 30м. Автомобили с разной скоростью двигались по дороге. Шаг интегрирования принят 0,001с.
В результатах фиксировались данные по среднему сечению (на расстоянии 15м от начала автомобильной дороги).
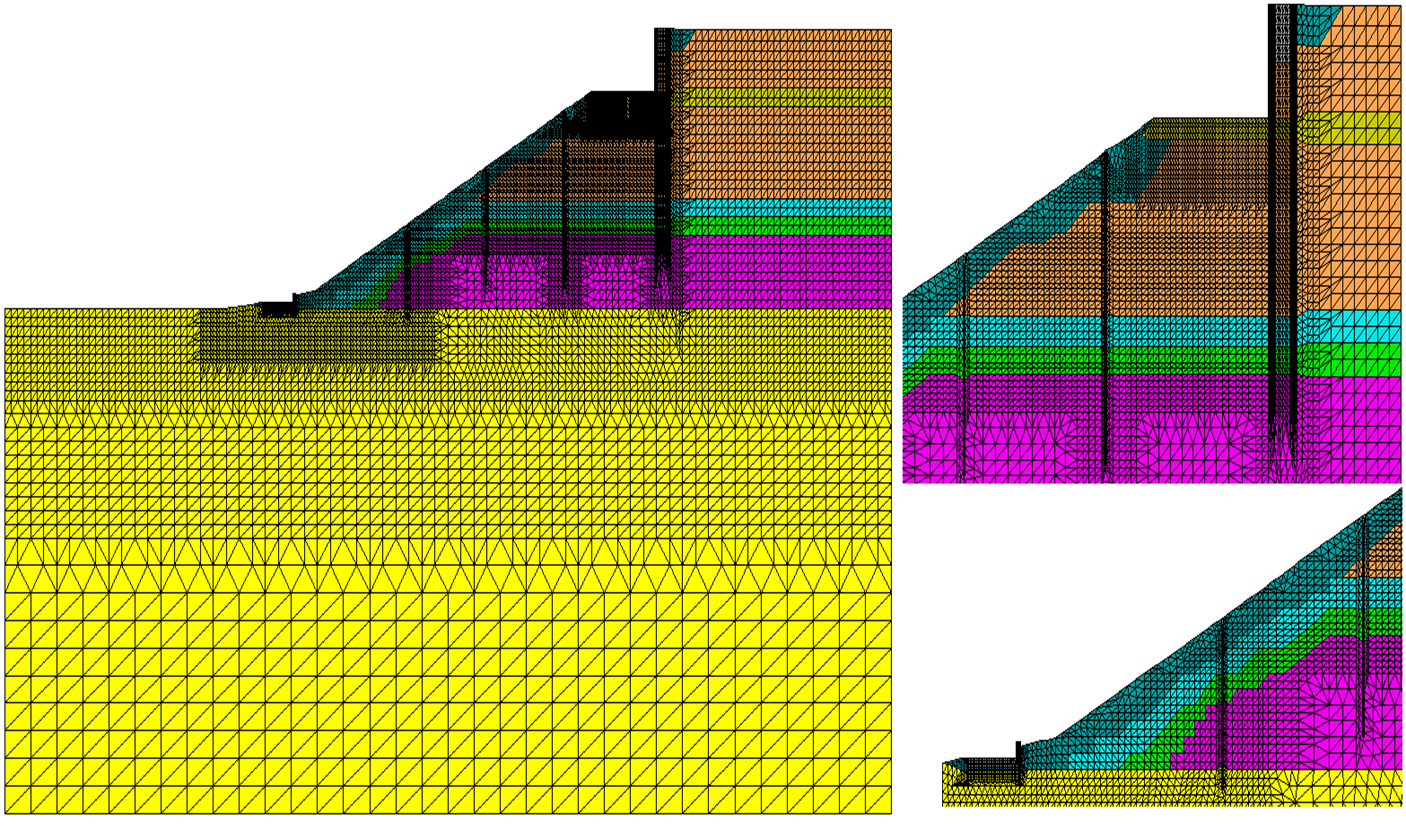
Рис. 9. Конечно-элементная модель поперечного сечения усиленного склона
На рисунках 10-11 показаны примеры графиков колебаний ряда точек поперечного сечения на расстоянии 15м от начала дороги. На каждом рисунке в левом ряду графиков показаны динамические перемещения точек при движении автомобиля по полосе 1 (ближней к краю откоса), в правом ряду – при движении по полосе 2 (дальней от края откоса).
В результатах очевидно влияние скорости движения на динамическую реакцию конструкции. Хотя для каждого типа автомобилей неизменна нагрузка, передаваемая со стороны колес на поверхность дороги, также неизменны расстояния между колесными осями и расположением колес на оси, очевидно отличие в графиках колебаний при движении с разной скоростью. Статическая постановка не позволяет учесть этот эффект. При увеличении скорости нарастают максимальные перемещения, а также увеличивается «выпор» — подъем в процессе колебаний отдельных точек дорожной конструкции. Затем, при увеличении скорости, перемещения начинают снижаться. Также величины перемещений зависят от полосы движения. При движении автомобиля по дальней от края откоса полосе перемещения снижаются – рис. 12.
На каждом графике рис. 10-11 показаны колебания по 15 точкам поперечного сечения. Отчетливо просматривается, что в колебательный процесс входят не только точки, расположенные по колее движения автомобиля, но и точки, расположенные на свободных от воздействия полосах дороги.
Прослеживается воздействие колес передней и задних осей. На рис. 10 точки автомобильной дороги «не успели» вернуться в исходное состояние перед воздействием задних колес. На рис. 11 колеса задней оси действуют на сечение, получившее противоположное перемещение (вверх).
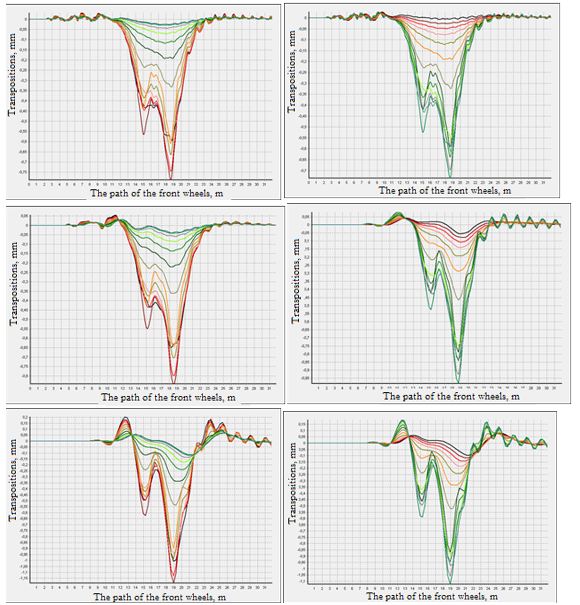
Рисунок 10. Двухосный грузовой автомобиль. Полосы 1- 2. A= 0.25м. v=30, 60, 90, 110км/ч
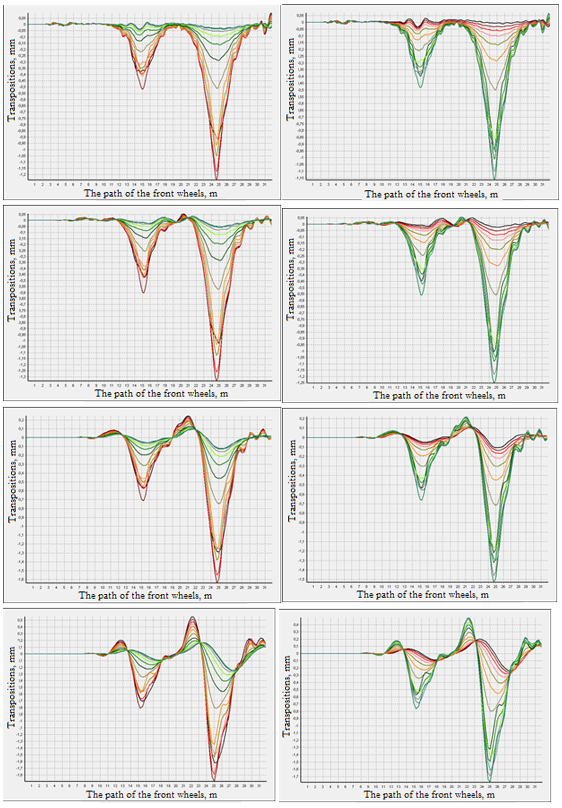
Рисунок 11. Трехосный седельный автопоезд. Полосы 1 и 2. A= 0,25м. v=30, 60, 90, 110км/ч
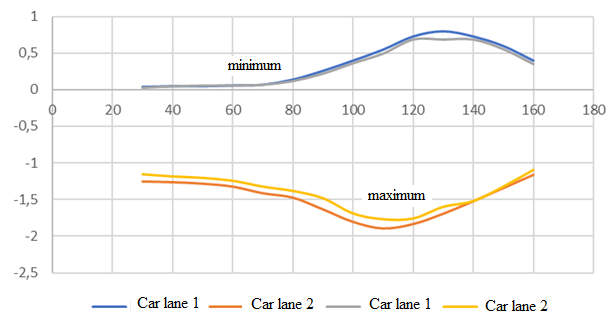
Рисунок 12. Максимальные перемещения (прогиб и выпор) при движении
Выводы
Основной вывод состоит в том, что моделирование работы склона в динамической постановке позволяет получить эффекты решения, которые нельзя моделировать в статической постановке.
Приведенный пример показывает необходимость использования динамического подхода при моделировании работы оползневых склонов.
Построенные уравнения позволяют учитывать такие параметры, как:
- инерционность подвижного состава и дорожной конструкции;
- скорость движения отдельных транспортных средств;
- предполагаемую интенсивность грузопотока в различные моменты времени (года и суток);
- влияние сезонно-климатических факторов (влажность грунта и температура асфальтобетона), изменение температуры в течение суток;
- неоднородность конструкций дорожной одежды и грунтового массива в плане и по глубине.
1. Болотин В.В. О воздействии подвижной нагрузки на мосты/-Труды МЙИТ, вып. 74, 1950.
2. Болотин В.В. О динамическом расчете железнодорожных мостов с учетом массы подвижной нагрузки.- Труды МИИТ, вып. 76, 1952.
3. Болотин В.В. Задача о колебаниях мостов под действием подвижной нагрузки/- изв. АН СССР, ОТН, мех-ка и машиностроение, №4, 1961.
4. Васильков, Г. В., Панасюк, Л. Н. О решении физически нелинейных задач динамики сооружений прямыми методами. - Известия Вузов. Строительство и архитектура, 1988, N 5, - С. 39-43.
5. Марчук, Г. И. Методы расщепления. - М.: Наука, 1988. - С. 28-40.
6. Марчук, Г. И. Математическое моделирование в проблеме окружающей среды. - М.: Наука, 1982. - 341 с.
7. Матуа В.П., Панасюк Л.Н., Чирва Д.В., Мирончук С.А., Сизоннец С.В., Исаев Е.Н. - Современные методы прогнозирования остаточных деформаций в дорожных конструкциях (науч. монография). - Ростов н/Д. : ДГТУ, 2019
8. Моргаевский А.Б. Исследование колебаний балки под действием подвижной нагрузки в виде полуполосы при больших скоростях Исслед. по теории сооружений", вып. 13, М. 1964, C. 105-120
9. Панасюк Л.Н., Тюрина В.С., Чубка Ю. Ш., Пошев А.У-Б. Моделирование работы оползневых склонов при динамическом воздействии // Инженерный вестник Дона [Электронный ресурс]: электрон. науч.- инновац. журн. 2018. №2.
10. Панасюк Л.Н., Матуа В.П. Механико-математическая модель прогнозирования накопления остаточных деформаций в элементах дорожных конструкций в реальных условиях их эксплуатации, - Повышение качества и долговечности дорожных конструкций: материалы Междунар. науч.-практ. конф., 24-25 мая 2018 г. / Дон. гос. техн. ун-т. - Ростов н/Д.: ДГТУ, 2018. - С. 27-34
11. Панасюк, Л. Н. О построении устойчивых схем прямого интегрирования нелинейных уравнений движения. Ростов н/Д, РГАС.- Деп. в ВИНИТИ N 1099-В94.-8с
12. Панасюк, Л. Н. О построении явных безусловно устойчивых схем прямого интегрирования задачи динамики сооружений // Известия вузов. Строительство, 1995.
13. Panasiuk L.N., Kravchenko G.M., Matua V.P. Numerical method for solving the problems of the building structures dynamics with a mobile massive load// Materials Science Forum ISSN: 1662-9752, Vol. 931 MSF, pp 72-77, 2018 Trans Tech Publications, Switzerland
14. L Panasiuk, V Turina, D Stupina. The supported landslide slopes' operation simulation //IOP Conference Series: Materials Science and Engineering. Construction mechanics, building materials and theory of structures, civil and industrial engineering [Электронный ресурс]: Volume 698, Issue 2.
15. L Panasiuk, V Turina. The stress-strain state simulation of slopes with dynamic loads //IOP Conference Series: Materials Science and Engineering. Construction mechanics, building materials and theory of structures, civil and industrial engineering [Электронный ресурс]: Volume 698, Issue 2.
