



Россия
Россия
ВАК 2.1.14 Управление жизненным циклом объектов строительства
УДК 004.93'12 Различение образов
УДК 69.05 Строительная площадка. Оборудование, организация и технология строительства. Индустриальное строительство. Монтаж. Испытания на строительной площадке. Строительные повреждения. Срок службы сооружений. Уход за сооружениями
Актуальность исследования обусловлена ростом объёмов строительства и увеличением количества одновременно задействованной техники на строительных площадках, что повышает требования к эффективности контроля соответствия фактического размещения машин и механизмов проектной документации. Традиционный визуальный контроль линейным персоналом является трудоёмким и подверженным влиянию человеческого фактора. Целью исследования является разработка и анализ программной системы автоматизированного контроля размещения строительной техники на строительной площадке на основе методов компьютерного зрения. Для достижения цели решены следующие задачи: выбор архитектуры нейронной сети для детекции строительной техники; формирование обучающей выборки и обучение модели распознавания; разработка алгоритма калибровки перспективы для сопоставления координат стройгенплана и фотографии; реализация программного комплекса с графическим интерфейсом пользователя. Методология исследования включает применение нейросетевой модели YOLO11, обученной на выборке из 750 изображений и распознающей 6 классов строительной техники, а также алгоритм перспективного преобразования координат на основе метода гомографии. В результате разработан программный комплекс, обеспечивающий загрузку стройгенплана и фотографии площадки, разметку зон допустимого размещения техники, автоматическую детекцию объектов и формирование протокола проверки с выявленными нарушениями. Разработанная система позволяет автоматизировать процесс контроля соответствия фактического размещения техники стройгенплану, сократить временные затраты линейного персонала и снизить влияние человеческого фактора при проведении проверок.
компьютерное зрение, детекция объектов, YOLO, нейронные сети, стройгенплан, строительная техника
Введение
Строительная отрасль является одной из ключевых отраслей экономики Российской Федерации. По данным Федеральной службы государственной статистики, объём работ, выполненных по виду экономической деятельности «Строительство», в 2025 году составил 18 815,1 млрд рублей, что почти вдвое превышает показатель 2020 года [1]. Рост объёмов строительства сопровождается увеличением количества одновременно задействованной техники на строительных площадках [2].
Эффективное управление строительной площадкой требует чёткой организации размещения техники и контроля соблюдения установленных требований. Основой такой организации выступает стройгенплан. Данный документ является обязательной частью раздела «Проект организации строительства» и определяет расположение строительных машин и механизмов на площадке [3, 4]. Контроль соответствия фактического размещения техники стройгенплану в настоящее время осуществляется визуально линейным персоналом, что требует значительных временных затрат и подвержено влиянию человеческого фактора [5].
Развитие технологий компьютерного зрения создаёт предпосылки для автоматизации визуального контроля [6]. Нейронные сети семейства YOLO являются эффективным инструментом для детекции объектов в реальном времени [7-10]. Однако существующие решения [11, 12] направлены на детекцию отдельных объектов и не предусматривают сопоставления результатов с проектной документацией.
Целью исследования является анализ предложенной программной системы автоматизированного контроля размещения техники на строительной площадке на основе методов компьютерного зрения.
Для достижения цели были решены следующие задачи:
- Выбрать архитектуру нейронной сети для детекции строительной техники.
- Сформировать обучающую выборку и обучить модель распознавания.
- Разработать алгоритм калибровки перспективы для сопоставления координат.
- Реализовать программный комплекс с графическим интерфейсом.
- Провести тестирование разработанной системы.
Материалы и методы
Методика исследования включает два основных направления: детекцию строительной техники на изображениях с применением нейросетевых алгоритмов и сопоставление результатов детекции с проектной документацией на основе перспективного преобразования координат.
В качестве архитектуры нейронной сети выбрана YOLO11 — актуальная версия семейства YOLO, разработанная компанией Ultralytics [13, 14]. Выбор обусловлен высокой скоростью обработки изображений и возможностью детекции объектов в реальном времени. Модель обучена на выборке из 750 изображений строительной техники и распознаёт 6 классов объектов: автокран, башенный кран, трактор, грузовик, самосвал и грузовой автомобиль [15].
Для сопоставления координат стройгенплана и фотографии площадки разработан алгоритм калибровки на основе перспективного преобразования [16]. Пользователь отмечает 4 соответствующие точки на стройгенплане и на фотографии, после чего вычисляется матрица преобразования с использованием функции getPerspectiveTransform библиотеки OpenCV [17]. Данная матрица позволяет преобразовывать координаты зон, заданных на плане, в координаты на фотографии.
На стройгенплане пользователь выделяет допустимые зоны размещения техники и указывает ожидаемый тип техники для каждой зоны. После детекции объектов на фотографии система определяет координаты нижней точки каждого обнаруженного объекта и проверяет попадание этой точки в одну из заданных зон. Результатом проверки является протокол с указанием выявленных нарушений.
Программная реализация выполнена на языке Python [18]. Для детекции объектов применена библиотека Ultralytics, обработка изображений и вычисление матрицы перспективного преобразования реализованы средствами OpenCV [19, 20]. Графический интерфейс построен с использованием библиотеки Tkinter, а корректное отображение кириллического текста на изображениях обеспечено библиотекой Pillow.
Результаты
В результате был разработан программный комплекс с графическим интерфейсом пользователя [21], обеспечивающий автоматизированный контроль размещения техники на строительной площадке.
Главное окно программы (рис. 1) состоит из следующих функциональных блоков:
• боковая панель управления с кнопками загрузки файлов, настройки зон и экспорта результатов;
• информационная панель с отображением количества зон, статуса калибровки и числа нарушений;
• область отображения стройгенплана с возможностью выделения зон размещения техники;
• область отображения фотографии площадки с результатами детекции;
• панель фильтрации классов техники;
• область вывода протокола проверки.
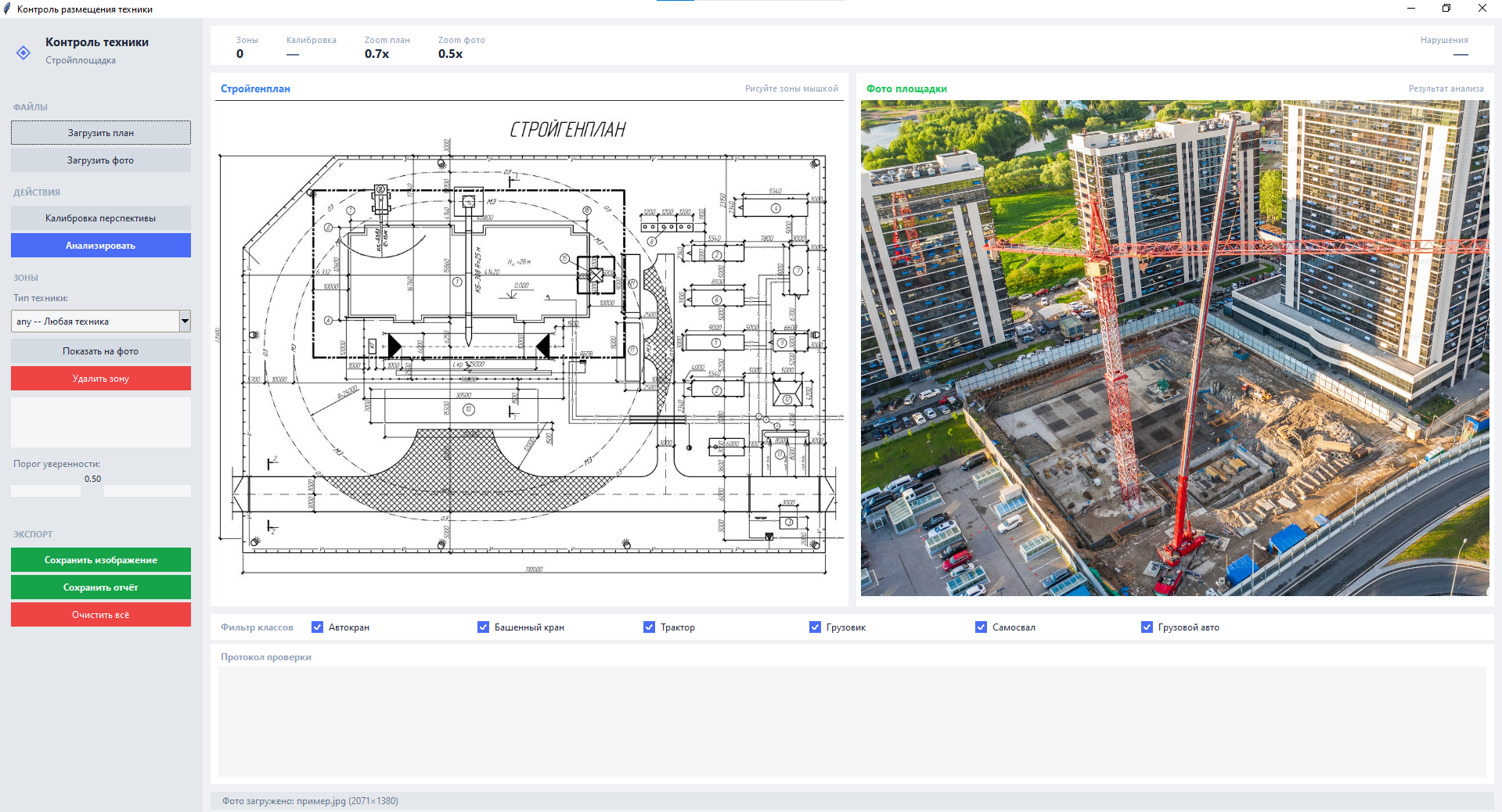
Рис. 1. Главное окно программного комплекса
Для сопоставления координат стройгенплана и фотографии реализовано отдельное окно калибровки (рис. 2). Пользователь последовательно отмечает 4 соответствующие точки на обоих изображениях, после чего система вычисляет матрицу перспективного преобразования.
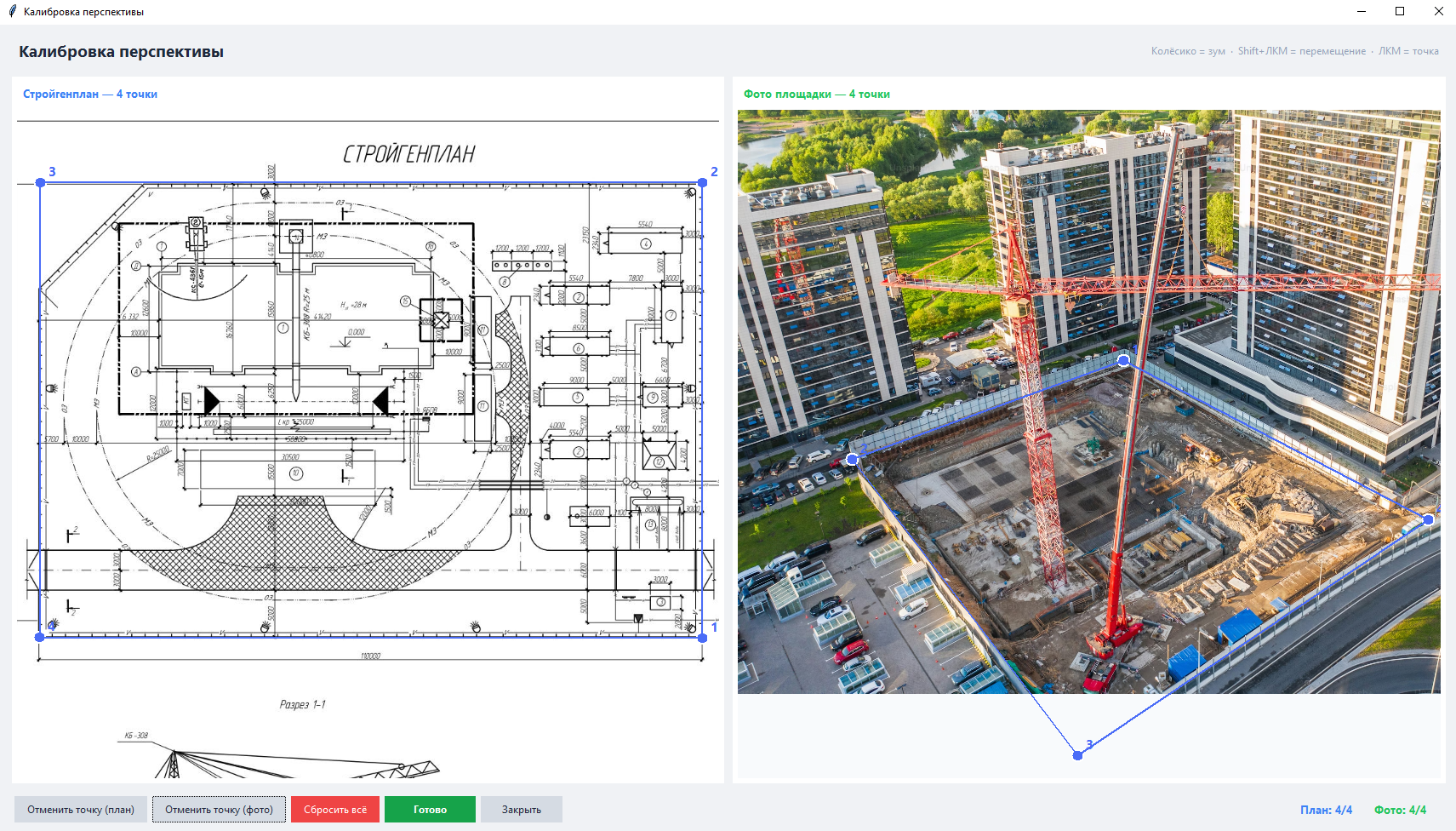
Рис. 2. Окно калибровки перспективы
Программа позволяет выделять на стройгенплане прямоугольные зоны допустимого размещения техники (рис. 3). Для каждой зоны указывается название и ожидаемый тип техники.
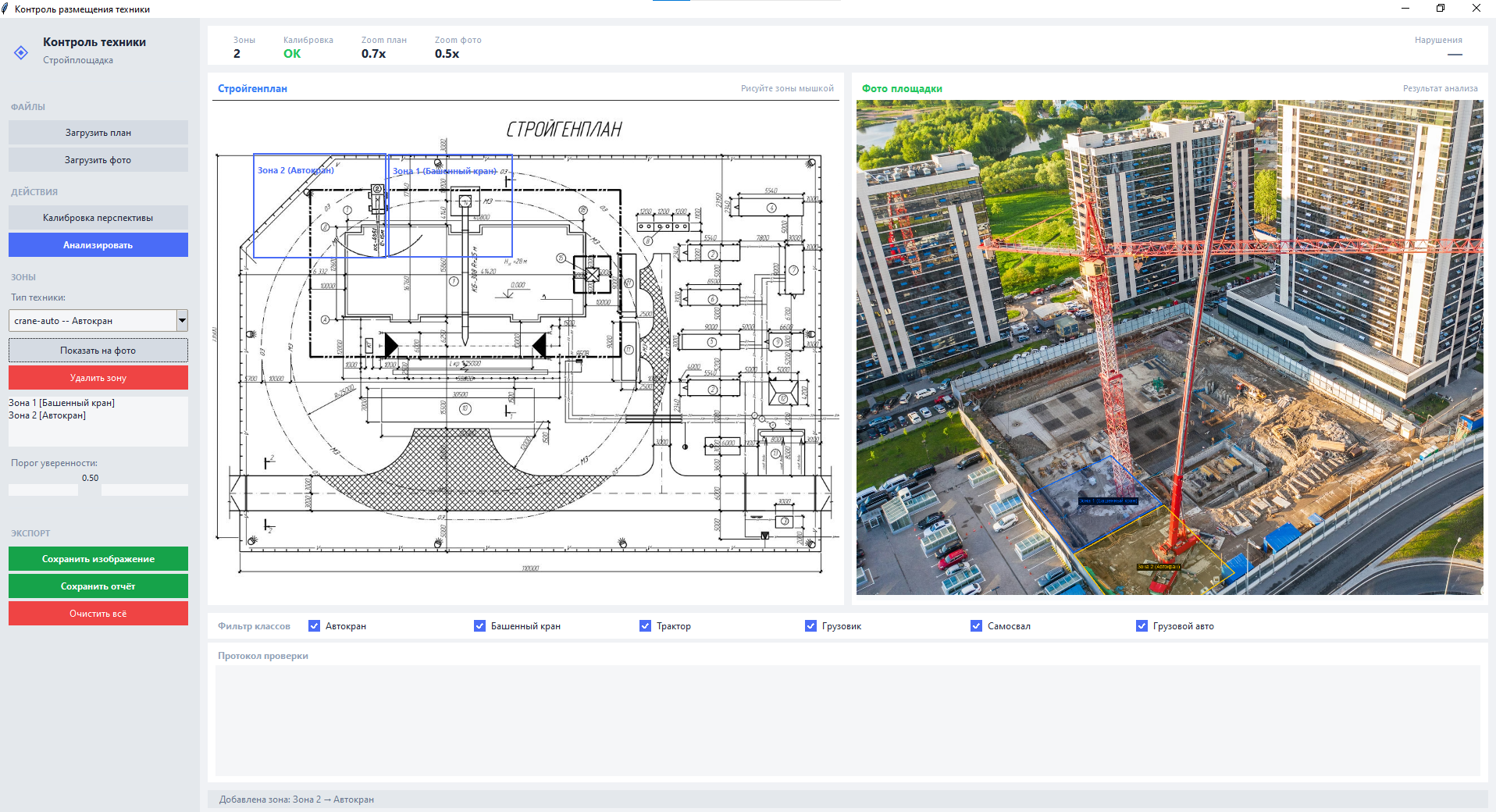
Рис. 3. Разметка зон размещения техники на стройгенплане
После анализа система отображает обнаруженные объекты с цветовой индикацией (рис. 4):
• зелёный — техника в допустимой зоне, тип соответствует;
• оранжевый — техника в зоне, тип не соответствует;
• красный — техника вне допустимых зон.
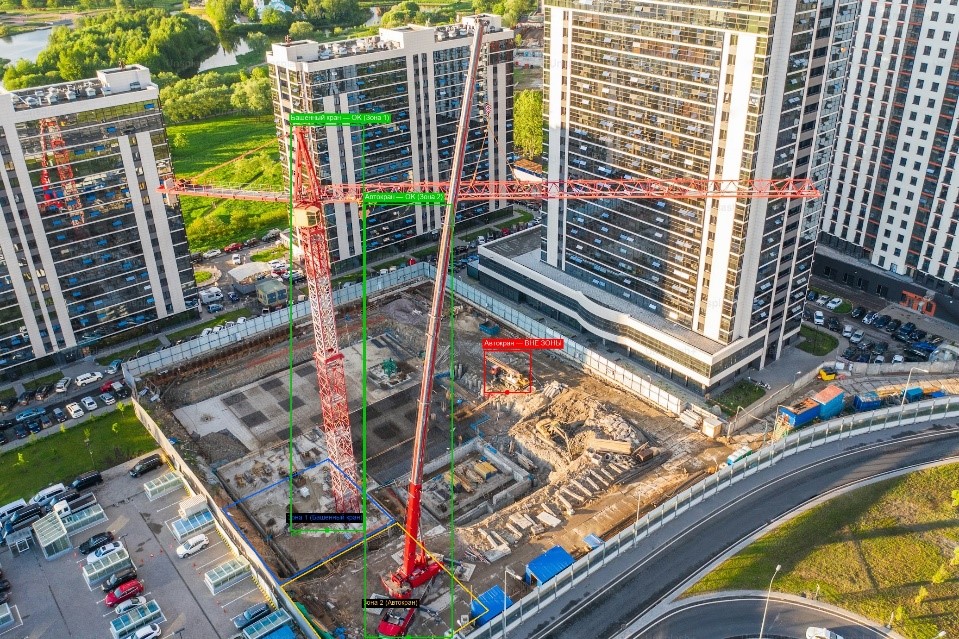
Рис. 4. Результаты детекции и проверки размещения техники
По результатам анализа формируется протокол (рис. 5), содержащий дату проверки, количество обнаруженной техники, выявленные нарушения и заключение о соответствии размещения стройгенплану.
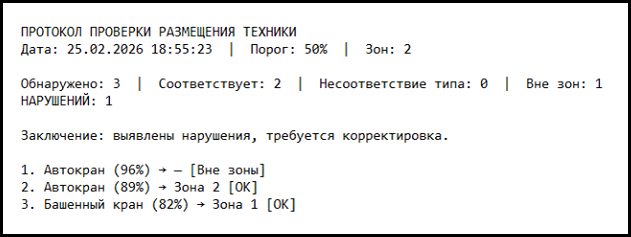
Рис. 5. Пример протокола проверки размещения техники
Программа позволяет сохранять изображение с визуализацией детекции и протокол в текстовом формате.
Разработанная система позволяет автоматизировать процесс контроля размещения техники на строительной площадке, который традиционно выполняется визуально линейным персоналом. Применение нейросетевой модели YOLO11 обеспечивает детекцию строительной техники на фотографиях в реальном времени, а алгоритм калибровки перспективы позволяет корректно сопоставлять координаты стройгенплана и фотографии при различных углах съёмки.
Отличительной особенностью разработанной системы является возможность не только обнаруживать технику на изображении, но и автоматически проверять соответствие её расположения проектной документации. Существующие решения в области компьютерного зрения для строительства [22], как правило, ограничиваются детекцией объектов без сопоставления с проектом.
Внедрение системы позволяет сократить временные затраты на контроль размещения техники, снизить влияние человеческого фактора и обеспечить документирование результатов проверки в виде формализованного протокола. Сравнительный анализ традиционного и автоматизированного подходов к контролю размещения техники представлен в таблице 1.
Таблица 1
Сравнение традиционного и автоматизированного контроля размещения техники
|
Критерий |
Традиционный контроль |
Разработанная |
Перспективы развития |
|
Объективность оценки |
Зависит |
Единые критерии оценки |
Интеграция с нормативными базами данных |
|
Документирование |
Ручное заполнение журналов |
Автоматическое |
Экспорт в BIM-системы |
|
Сопоставление |
Визуальное сравнение с планом |
Автоматическое |
Автоматическое распознавание зон |
|
Человеческий фактор |
Высокое влияние |
Минимальное влияние |
Формирование аналитики |
|
Возможность |
Затруднена |
Сохранение |
Интеграция с видеонаблюдением |
Дальнейшее совершенствование системы может включать расширение обучающей выборки для повышения точности детекции, автоматическое распознавание зон на стройгенплане, интеграцию с системами видеонаблюдения для непрерывного мониторинга [23, 24] и разработку мобильного приложения.
Обсуждение
Полученные результаты подтверждают гипотезу исследования: совместное применение нейросетевой детекции и перспективного преобразования координат действительно позволяет автоматизировать контроль соответствия размещения техники стройгенплану. Система корректно формирует протокол проверки, разграничивая три типа нарушений — технику вне зон, технику не того типа и технику в допустимой зоне, что достаточно для практического применения в условиях линейного контроля.
Вместе с тем необходимо обозначить ограничения применимости результатов. Точность детекции зависит от условий съёмки: при плохом освещении, сильном перекрытии объектов или нестандартных ракурсах вероятность ошибки распознавания возрастает [25]. Качество перспективного преобразования определяется точностью ручной разметки четырёх опорных точек — систематическая ошибка при их выборе приводит к смещению всех зон на фотографии. Оба ограничения носят методический характер и не являются принципиальными препятствиями для развития системы.
Обобщая, можно констатировать, что предложенный подход демонстрирует принципиальную осуществимость автоматизированного контроля соответствия стройгенплану средствами компьютерного зрения без применения специализированного оборудования. Результаты исследования могут служить основой для разработки более комплексных систем мониторинга строительных площадок, в том числе с интеграцией потоков видеонаблюдения и расширением перечня контролируемых параметров.
Заключение
В рамках исследования разработана программная система автоматизированного контроля размещения техники на строительной площадке на основе методов компьютерного зрения. Для детекции строительной техники использована нейросетевая модель YOLO11, обученная распознавать 6 классов объектов. Разработан алгоритм калибровки перспективы, позволяющий сопоставлять координаты стройгенплана и фотографии площадки. Реализован программный комплекс с графическим интерфейсом, обеспечивающий загрузку изображений, разметку зон допустимого размещения техники, автоматическую детекцию объектов и формирование протокола проверки с выявленными нарушениями.
Разработанная система позволяет автоматизировать процесс контроля соответствия фактического размещения техники стройгенплану, сократить временные затраты линейного персонала и снизить влияние человеческого фактора. Результаты работы могут быть использованы строительными организациями для повышения эффективности контроля на строительных площадках.
1. Федеральная служба государственной статистики. Объем работ, выполненных по виду экономической деятельности «Строительство» [Электронный ресурс]. — URL: https://rosstat.gov.ru/folder/14458 (дата обращения: 23.02.2026).
2. СП 48.13330.2019. Организация строительства. СНиП 12-01-2004 : свод правил : издание официальное : утверждён Приказом Министерства строительства и жилищно-коммунального хозяйства Российской Федерации от 24 декабря 2019 г. № 861/пр : введён в действие с 25 июня 2020 г. — Москва : Стандартинформ, 2020. — 24 с.
3. Redmon, J. You Only Look Once: Unified, Real-Time Object Detection / J. Redmon, S. Divvala, R. Girshick, A. Farhadi // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). — 2016. — P. 779–788. DOI: https://doi.org/10.1109/CVPR.2016.91
4. Ultralytics YOLO11 Documentation [Электронный ресурс]. — URL: https://docs.ultralytics.com/models/yolo11/ (дата обращения: 23.02.2026).
5. Bradski, G. The OpenCV Library / G. Bradski // Dr. Dobb's Journal of Software Tools. — 2000. — Vol. 25. — P. 120–125.
6. Python Software Foundation. Python Language Reference, version 3.12 [Электронный ресурс]. — URL: https://docs.python.org/3/ (дата обращения: 23.02.2026).
7. Bochkovskiy, A. YOLOv4: Optimal Speed and Accuracy of Object Detection / A. Bochkovskiy, C.-Y. Wang, H.-Y. M. Liao // arXiv preprint arXiv:2004.10934. — 2020. — URL: https://arxiv.org/abs/2004.10934 (дата обращения: 23.02.2026).
8. Wang, C.-Y. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors / C.-Y. Wang, A. Bochkovskiy, H.-Y. M. Liao // Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). — 2023. — P. 7464–7475. DOI: https://doi.org/10.1109/CVPR52729.2023.00721
9. Hartley, R. Multiple View Geometry in Computer Vision / R. Hartley, A. Zisserman. — 2nd ed. — Cambridge : Cambridge University Press, 2004. — 670 p. DOI: https://doi.org/10.1017/CBO9780511811685
10. Szeliski, R. Computer Vision: Algorithms and Applications / R. Szeliski. — 2nd ed. — Cham : Springer, 2022. — 925 p. DOI: https://doi.org/10.1007/978-3-030-34372-9
11. Jocher, G. Ultralytics YOLO [Электронный ресурс] / G. Jocher, A. Chaurasia, J. Qiu // GitHub. — 2023. — URL: https://github.com/ultralytics/ultralytics (дата обращения: 23.02.2026).
12. LeCun, Y. Deep learning / Y. LeCun, Y. Bengio, G. Hinton // Nature. — 2015. — Vol. 521, № 7553. — P. 436–444. DOI: https://doi.org/10.1038/nature14539
13. Gonzalez, R. C. Digital Image Processing / R. C. Gonzalez, R. E. Woods. — 4th ed. — New York : Pearson, 2018. — 1168 p.
14. Жмуров, В. В. Искусственный интеллект и машинное обучение в управлении строительной техникой / В. В. Жмуров, А. Ю. Кобзов, Е. А. Жук // Механики XXI веку. — 2025. — № 24. — С. 85–89. EDN: https://elibrary.ru/JGNFHG
15. Вирясова, В. А. Организация строительной площадки при новом строительстве и реконструкции объектов / В. А. Вирясова, Ю. Ю. Дубровина, С. В. Цыбакин // Актуальные вопросы развития науки и технологий : сборник статей молодых учёных. — Караваево : Костромская ГСХА, 2024. — С. 628–633. EDN: https://elibrary.ru/PRBYMT
16. Eum, I. Heavy Equipment Detection on Construction Sites Using You Only Look Once (YOLO-Version 10) with Transformer Architectures / I. Eum, J. Kim, S. Wang, J. Kim // Applied Sciences. — 2025. — Vol. 15, № 5. — Art. 2320. DOI: https://doi.org/10.3390/app15052320
17. Feng, R. A YOLO-Based Intelligent Detection Algorithm for Risk Assessment of Construction Sites / R. Feng, Y. Miao, J. Zheng // Journal of Intelligent Construction. — 2024. — Vol. 2, № 4. — P. 1–18. DOI: https://doi.org/10.26599/Jic.2024.9180037
18. Xu, Y. Machine learning in construction: From shallow to deep learning / Y. Xu, Y. Zhou, P. Sekula, L. Ding // Developments in the Built Environment. — 2021. — Vol. 6. — Art. 100045. DOI: https://doi.org/10.1016/j.dibe.2021.100045; EDN: https://elibrary.ru/XUIKSG
19. Delgado, J. M. D. Deep learning with small datasets: using autoencoders to address limited datasets in construction management / J. M. D. Delgado, L. Oyedele // Applied Soft Computing. — 2021. — Vol. 112. — Art. 107836. DOI: https://doi.org/10.1016/j.asoc.2021.107836; EDN: https://elibrary.ru/BRFYWF
20. Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow / A. Géron. — 2nd ed. — Sebastopol : O'Reilly Media, 2019. — 856 p.
21. Котов, Н. В. Разработка и исследование нейросетевых алгоритмов для систем видеоаналитики на строительных площадках / Н. В. Котов, А. Е. Назаровский, В. В. Хрящев // Цифровая обработка сигналов и её применение (ЦОС-2021) : доклады 23-ей Международной конференции. — Москва : РНТОРЭС им. А. С. Попова, 2021. — С. 194–197. EDN: https://elibrary.ru/IVSICT
22. Fang, W. Computer vision applications in construction safety assurance / W. Fang, L. Ding, B. Zhong, P. E. D. Love, H. Luo // Automation in Construction. — 2024. — Vol. 159. — Art. 105235.
23. Галиева, А. Р. Научно-техническое исследование влияния цифровых технологий на эффективность строительного производства / А. Р. Галиева // Наука и бизнес: пути развития. — 2020. — № 11(113). — С. 49–53. EDN: https://elibrary.ru/JXAXMK
24. Епанчинцев, Т. С. Влияние человеческого фактора на качество строительства: методы минимизации ошибок / Т. С. Епанчинцев, В. А. Бычков, И. Е. Семенко // Современная экономика: актуальные вопросы, достижения и инновации : сборник статей II Международной научно-практической конференции. — Пенза : Наука и Просвещение, 2025. — С. 8–11. EDN: https://elibrary.ru/XMLESW
25. Bahtyyarova, Sh. Human-computer interaction: user experience (UX) design, interface design, and interaction technologies / Sh. Bahtyyarova, J. Shohradova // Матрица научного познания. — 2024. — № 10-2. — С. 24–27. EDN: https://elibrary.ru/VEKGCK
